Define Transformation and Projection
Computer Graphics
672 Views
Define Transformation and Projection
- The transformation of points from a coordinate system in n dimensions to a coordinate system in m dimensions where m<n.
- There are fundamental differences between the true three-dimensional world and its pictorial description.
- For centuries, artists, engineers, designers, drafters, and architects have tried to represent a three-dimensional object or scene in a two-dimensional medium à called projection.
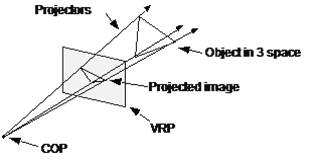
- Projection plane- A 2D coordinate system onto which the 3D image is to be projected. We’ll call this the VRP for view reference plane.
- Center of projection- COP- A point in space which serves as an end point for projectors. We’ll refer to this point as the COP. It is also called a PRP for a projection reference point.
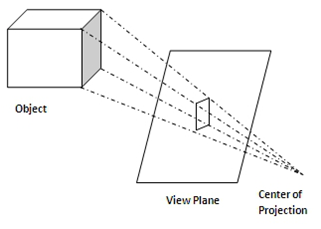
- Projectors – a ray originating at the center of projection and passing through a point to be projected. Here is an example of a projection.
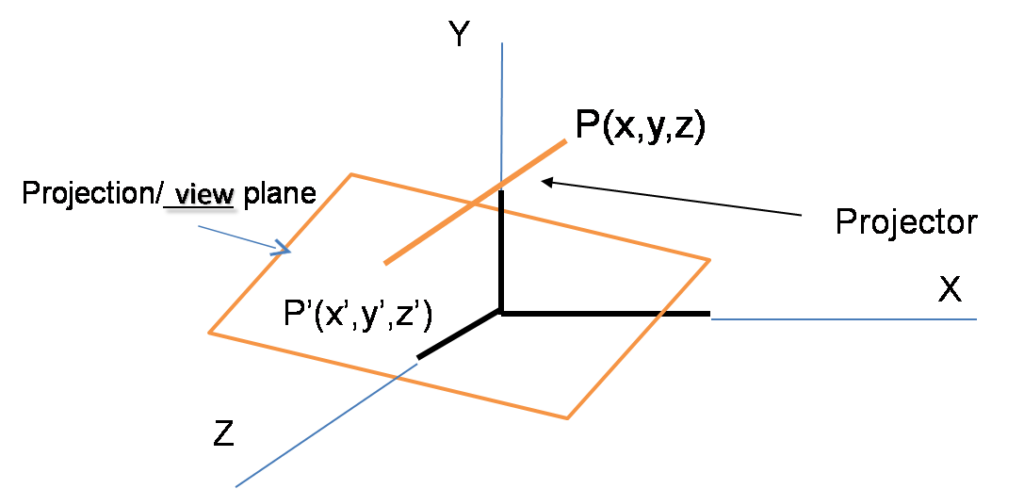
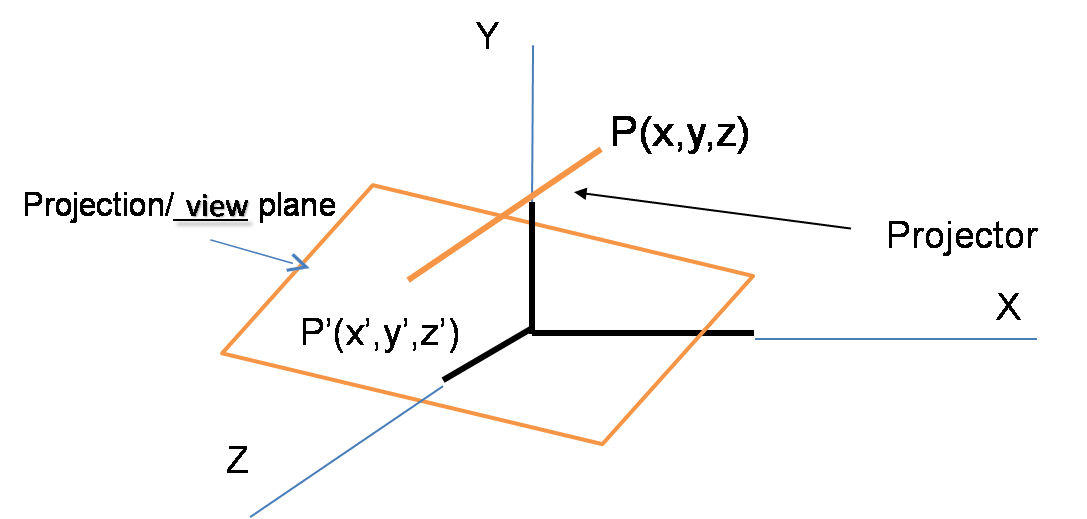
- Projection can be defined as a mapping of point P(x,y,z) onto its image P’(x’,y’,z’) in the projection plane, which constitute the display surface.
- The mapping is determined by a projection line called the Projector that passes through P and intersect the view plane. The intersection point is P’.